Vision based teleoperation
To teleoperate the hand, we use HaMeR, a vision-based transformer to extract MANO hand poses, and directly translate it to the hand.
1University of Illinois Urbana-Champaign 2UC Irvine
* Equal contribution † Equal advising
We introduce CRAFT Hand, a tendon-driven anthropomorphic hand with hybrid hard-soft compliance for contact-rich manipulation. The design is based on a simple idea: contact is not uniform across the hand. Impacts concentrate at joints, while links carry most of the load. CRAFT places soft material at joints and keeps links rigid, and uses rolling-contact joint surfaces to keep flexion on repeatable motion paths. Fifteen motors mounted off the fingers drive the hand through tendons, keeping the form factor compact and the fingers light. In structural tests, CRAFT improves strength and endurance while maintaining comparable repeatability. In teleoperation, CRAFT improves handling of fragile and low-friction items, and the hand covers 33/33 grasps in the Feix taxonomy. The full design costs under $600 and will be released open-source with vision-based teleoperation and simulation integration.
Vision Based teleoperation
Raspberry (2x)
Wine Glass (2x)
Wipe Table (2x)
Ball (2x)
Chip Bag (2x)
Plush Toy (2x)
Toast (2x)
To teleoperate the hand, we use HaMeR, a vision-based transformer to extract MANO hand poses, and directly translate it to the hand.
The soft TPU within the hand is able to deform and conform to the shape of objects it's colliding with, allowing for easier manipulation and is more resilient to damage.
Our finger design uses a rolling contact joint mechanism for smooth, natural motion.
We have RUKA, which doesn't have adduction-abduction, and ORCA, which doesn't have the DIP joint movement. Our hand demonstrates side to side dexterity in both the finger up and finger down configuration, as well as a DIP joint that moves with the pip joint. This is thanks to its Rolling Joint and abduction-adduction mechanism.
RUKA
ORCA
CRAFT
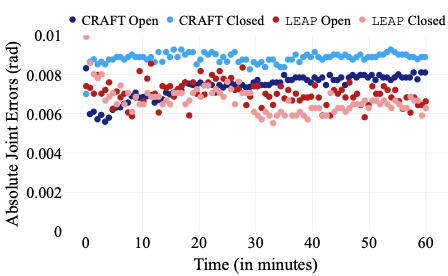
We can test how repeatable the hand is, showing very little error during continuous operation of the hand. Doing a head to head comparison the the LEAP lite hand (same dynamixel motors) with continued operation over one hour.
Force testing comparison using ArUco codes for tracking motor bend angle. Our hand shows much stronger force before bending to 15 degrees compared to the LEAP Lite hand (both using the same Dynamixel motors).